一人で好きなときに好きな場所へ行きたい。
いくつになっても誰もが持っている「思い」ではないでしょうか。ただし視覚障害者にとってそれは簡単ではありません。非常に難しいと感じる人も多いはずです。
そんな視覚障害者に、自由な一人歩きの期待を抱かせてくれるロボットが、実用化に向けて動き出しました。その名も「Guide Cane(ガイドケーン)」、車輪付き杖型ナビです。大阪市立大学の機械力学研究室で講師をされている今津篤志先生によるもので、これを使えば将来ほんとうに好きなときに好きな場所へ行けるかもしれないのです。
海外旅行の定番ガイドブック・地球の歩き方は、これさえあれば旅慣れていない人でも一人で海外旅行に行ける優れものです(個人差あり)。Guide Caneは視覚障害者の新しい地球の歩き方になる可能性を秘めています。
人とロボットの役割分担がGuide Caneの強み!
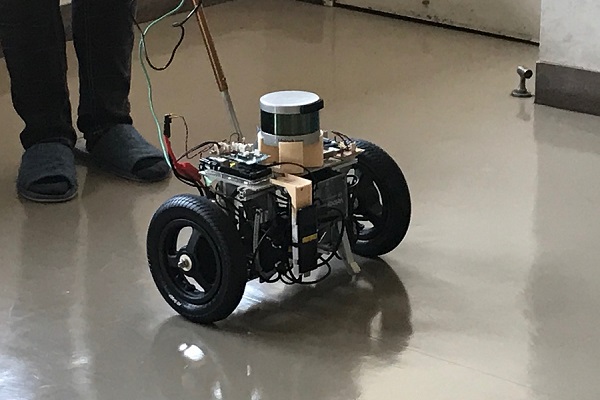
Guide Caneとはどういうものなのか。ひとことで言うと、杖の先に車輪付きロボットがついたもの。肩幅ぐらいの間隔でふたつの車輪があり、そのふたつの車輪を繋ぐロボット部分から杖が伸びています。杖を介して車輪を動かすと、地図と設定経路にしたがって目的地まで誘導してくれるのです。
盲導犬ロボットという概念は30~40年前からありましたが、Guide Caneがそれらと異なるのは動力がついていないこと。ロボット自体に動力をつけるとどうしても大型で重くなります。Guide Caneでは、動かすのは人、ステアリングとブレーキ操作をするのがロボット、というふうに人とロボットの役割を明確に分け、小さく軽量化しました。
例えるなら、タンデム自転車のようなものです。後ろに乗ってペダルを漕ぐ(動力の役割をする)のが視覚障害者、前に乗って周囲の環境認識とハンドル操作とブレーキの役割をするのがロボット、というイメージでしょうか。
Guide Caneの実用化に向けてお願いしたいこと
期待が膨らむGuide Caneですが、今すぐ視覚障害者が自由にどこへでも行けるかというとそうではありません。実用化に向けて第一歩を踏み出したに過ぎないのです。
具体的には、屋内の安全な場所で検証を繰り返していこうという段階です。病院、学校、空港、ショッピングモールなど。Guide Caneの設置と検証に協力してくれる場所で、最初は今津先生や研究室の学生さんが視覚障害者と一緒にテストを行います。安全が確認できれば次の段階として施設にGuide Caneを預けて、自由に施設内で使ってもらうようにする、というものです。
そしてここからは多くの方の協力が必要になってきます。
- 検証させてくれる公共の施設
- 施設で実際に使ってくれる視覚障害者の方
- 施設に設置する充電ドッグの開発費用
特に③がなければ、公道に出て使用するための開発へと繋がりません。以前取材させていただいた新潟大学の渡辺准教授も仰っていましたが、国公立大学の研究開発予算は年々減っています。Guide Caneの充電ドッグを開発するために今津先生はクラウドファンディングを開始されました。ぜひご覧ください。
充電ドッグとは? 目的と必要性
クラウドファンディング掲載ページで寄付にご協力願います
試してみなければわからない、はたして実用性は?
ではGuide Caneはどれほどの実用性があるのか? 視覚障害当事者3人で試してみました。
場所は大阪市立大学工学部の建物内。被験者は先天性全盲女性のYさん、中途ロービジョン女性のNさん(少し視力は残っているものの単独歩行は困難)、そして同じく中途ロービジョンである筆者(視野狭窄だが視力はまだ残っているので白杖は状況次第でたまに使用する程度)。
コースは2か所の角を曲がる仕様で、1つ目の角から2つ目の角までの直線がやや長めになっています。
まずは全盲女性Yさん。さすが!Guide Caneを押して歩くスピードは速い。1つ目の角を問題なく曲がり直線へ。ですが直線では蛇行しながら途中で壁に接触(この時はブレーキ機能をOFFにしていたが本来は接触する前にブレーキがかかります)。2つ目の角も問題なく曲がってフィニッシュ。ロービジョン女性Nさんもなかなかのスピードで歩き始めます。Yさん同様、蛇行と壁への接触はありましたが、角は2か所とも問題なく曲がっていかれました。

筆者はブレーキ設定をONにして直線の途中まで試してみます。敢えて目を瞑ってGuide Caneだけに頼る歩行にチャレンジ。おっかなびっくり歩きますが、角を曲がってる??という感覚はなんとなくわかる。そして直線。壁にはぶつからず、障害物役の学生さんが前に現れたところでブレーキがかかりストップ。ブレーキはつんのめるような衝撃はなく優しく確実に手に伝わるような感触でした。
筆者は女性ふたりに比べて相当遅いスピードで歩いてたと思うのですが、今津先生に「ゆっくりな分、蛇行も少なく角も綺麗に曲がれてましたよ」と言われてやや上機嫌。慣れないうちは早く歩くほど蛇行しやすいようです。それでもYさんもNさんも2回目は1回目よりも感覚をつかんだようで、蛇行する幅が少し小さくなっています。そしておふたりとも「怖くなかった」「安定感があった」とのご意見でした。
結論、GuideCaneは夢がある!
どんなものでも慣れるまで多少の練習は必要です。したがってこの短時間だけで判断するのは難しいですが3人の共通認識は「慣れたらかなり使えそう」。それもそのはず、初めての操作で3人とも綺麗に角を曲がれたんです。よく考えたらこれって凄くないですか? 見えてない状態で誰の補助もなく、白杖で壁を探ることもなく、通路の真ん中を通って角を曲がったんです!
自由にどこへでも、を実現するにはまだまだ超えるべきハードルがたくさんあります。ですが確実に視覚障害者の行動範囲が広がる、そんな夢が見れました。GuideCaneをさらに進化させるため、一人でも多くの方にこの研究を知っていただきたい。切にそう願います。